| Автор |
Съобщение |
|
fred
Ранг: Форумен бог
Регистриран на: Чет Окт 05, 2017 11:55 pm
Мнения: 1692

|
 Определяне на положението с IMU Някой с опит в разработването на устройства с акселерометър/IMU може ли да каже каква е максимално постижимата точност на определяне на положението с тях? Условията в които ще измерва са: праволинейно движение на дистанция 0-15м, наклон 0-45 градуса, скорост 0-1м/сек. Относително равномерно движение от лебедка или хидравличен цилиндър но все пак са възможни неравномерности. Естествено и ускоренията при спиране/тръгване. Става дума за масовите сензори, не нещо супер специално с военно предназначение.
_________________
Остап Бендер: Спасяването на давещите се е дело на самите давещи се.
Стендал: Овчарят винаги се стреми да убеди овцете, че неговите и техните интереси съвпадат.
|
| Съб Фев 09, 2019 4:08 pm |

|
|
|
gicho
Ранг: Форумен бог
Регистриран на: Пон Мар 13, 2006 12:59 pm
Мнения: 3855
Местоположение: Габрово
|
Re: Определяне на положението с IMU Ако няма други скрити козове да се референцира от време на време, не го виждам да стане изобщо. Имам предвид ако се знае че винаги сменя в някаква известна точка примерно ще е горница информация, ама само с акселерометър да интегрираш ускорение през скорост до позиция и да получиш нещо вярно - не го вярвам.
|
| Съб Фев 09, 2019 5:53 pm |
|
|
|
fred
Ранг: Форумен бог
Регистриран на: Чет Окт 05, 2017 11:55 pm
Мнения: 1692
|
Re: Определяне на положението с IMU Референция има понеже интервала на измерване е известен, от порядъка 9 до 15м. Не се изменя непрекъснато ами е например 9 метра, 100 пъти тръгва и спира, началната и крайната точка се знаят за всеки цикъл. И трябва да привържа измерванията към положението вътре в цикъла, примерно на всеки 10см. Същото и за ъгъла, и той е постоянен за тези 100 измервания. И за тези общо 900 метра се знаят началото и края. Т.е. грешката може и да се разхвърля.
_________________
Остап Бендер: Спасяването на давещите се е дело на самите давещи се.
Стендал: Овчарят винаги се стреми да убеди овцете, че неговите и техните интереси съвпадат.
|
| Съб Фев 09, 2019 6:02 pm |
|
|
|
gicho
Ранг: Форумен бог
Регистриран на: Пон Мар 13, 2006 12:59 pm
Мнения: 3855
Местоположение: Габрово
|
Re: Определяне на положението с IMU Нещо оптично (лазерно) или ултразвуково не може ли да се сложи? Да се мери директно необходимата физическа величина, вместо да се интегрира двойно?
Има прости датчици от типа на лазерните рулетки - измерват отражението. Ако 1-2см са приемлива грешка може да се постигне лесно.
|
| Пон Фев 11, 2019 8:02 pm |
|
|
|
fred
Ранг: Форумен бог
Регистриран на: Чет Окт 05, 2017 11:55 pm
Мнения: 1692
|
Re: Определяне на положението с IMU За съжаление не може  иначе нямаше да пиша тук. Автономно устройство което няма връзка с началната точка. Бях останал с впечатлението, че тук има хора които работят с IMU, май е на някакви птици или диви животни ги бяха слагали. Но явно там е участвали GPS, твърде големи дистанции са. Не невъзможна задачата, в една статия четох 50см грешка на 500м. Да не говоря какво постигат с военни устройства, крилатите ракети на хиляди километри летят и т.н. Но всичко иска много скъпи сензори а номерът е да се направи максимално евтино. Не е прилагано досега така че и скромен резултат ще впечатли.
_________________
Остап Бендер: Спасяването на давещите се е дело на самите давещи се.
Стендал: Овчарят винаги се стреми да убеди овцете, че неговите и техните интереси съвпадат.
|
| Пон Фев 11, 2019 8:22 pm |
|
|
|
ilkor
Ранг: Форумен бог
Регистриран на: Вто Мар 31, 2009 9:25 am
Мнения: 1391
|
Re: Определяне на положението с IMU С излизането на Bluetooth 5.1 много се заговори за неговите възможности за локализация с точност под метър. Номерът е обаче че не се измерва разстояние, а ъгъл между устройство локатор и елементарен преносим таг. Измерването е триизмерно така че ако имаш 2-3 локатора на фиксирани позиции предполагам можеш да определиш местоположението на обекта в пространството. Има доста материали в интернет и клипове демонстриращи как работи. Трябва да потърсиш за "Angle of Arrival" или "Angle of Departure" - това са двата варианта в които локализацията се извършва в локатора (Angle of Arrival) или в обекта (Angle of Departure) Говори се за точност от порядъка на 3-5 градуса. Виж дали това няма да е полезно? https://www.youtube.com/watch?v=c3XqbEKmNcM 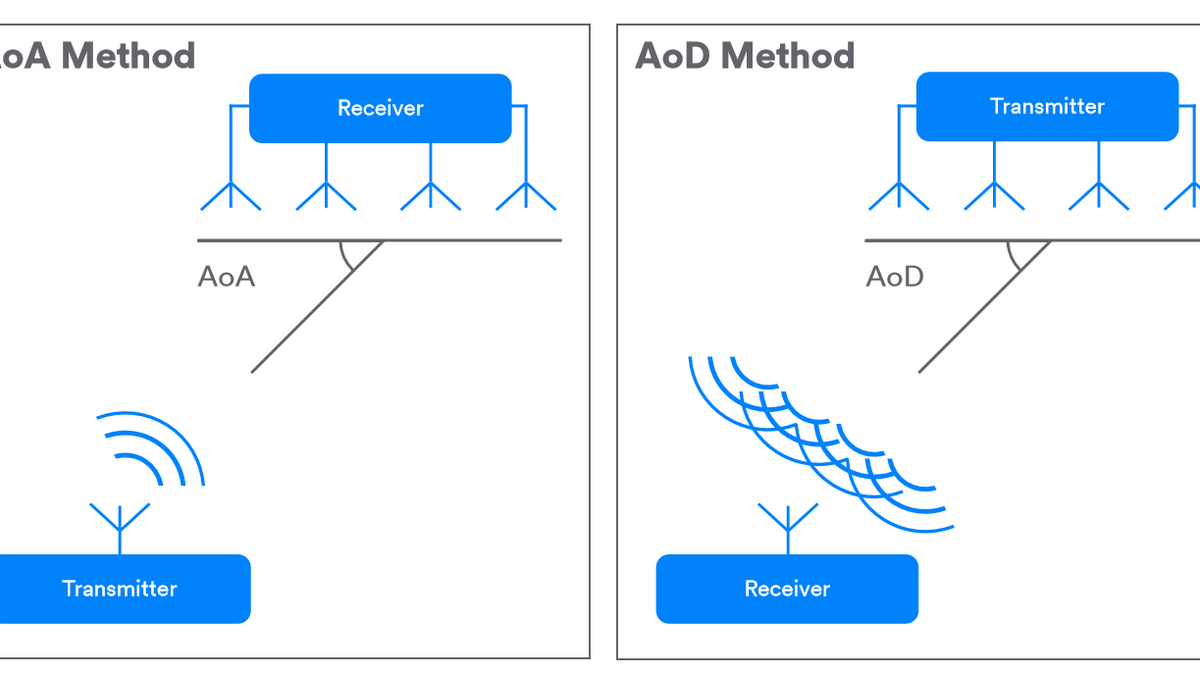
|
| Пон Фев 11, 2019 8:43 pm |
|
|
|
fred
Ранг: Форумен бог
Регистриран на: Чет Окт 05, 2017 11:55 pm
Мнения: 1692
|
Re: Определяне на положението с IMU Не, каквито и да са методи с някаква опорна точка с която се комуникира по какъвто и ще да е начин са неприложими. Само автономно устройство разчитащо единствено на себе си. Отгоре и на това и GPS не може да му се сложи защото е под земята, също и магнитного поле на Земята е недостъпно.
_________________
Остап Бендер: Спасяването на давещите се е дело на самите давещи се.
Стендал: Овчарят винаги се стреми да убеди овцете, че неговите и техните интереси съвпадат.
|
| Пон Фев 11, 2019 9:06 pm |
|
|
|
ToHu
Ранг: Форумен бог
Регистриран на: Нед Сеп 26, 2004 8:21 pm
Мнения: 28019
Местоположение: София
|
Re: Определяне на положението с IMU Не е невъзможно, но само с IMU твърдотелно не знам, някакво истинско жиро или не е възможно ?
|
| Пон Фев 11, 2019 9:23 pm |
|
|
|
gicho
Ранг: Форумен бог
Регистриран на: Пон Мар 13, 2006 12:59 pm
Мнения: 3855
Местоположение: Габрово
|
Re: Определяне на положението с IMU Това автономно устройство лети ли? Ако има контакт с земята не може ли да се сложи енкодер на него и да си брои пътя напред и назад?
|
| Вто Фев 12, 2019 10:06 am |
|
|
|
ToHu
Ранг: Форумен бог
Регистриран на: Нед Сеп 26, 2004 8:21 pm
Мнения: 28019
Местоположение: София
|
Re: Определяне на положението с IMU Доколкото разбирам то се движи под земята, Фред е започнал да слага дистанционни на къртици 
|
| Вто Фев 12, 2019 10:48 am |
|
|
|
al_at
Ранг: Форумен бог
Регистриран на: Пет Апр 13, 2018 3:00 pm
Мнения: 1324
Местоположение: София
|
Re: Определяне на положението с IMU Изглежда, че не е невъзможно. Трябват 3-осни акселерометри и жироскопи и доста сложна математика. Ето една статия, която дава представа за грешките на акселерометъра и жироскопа на телефон Nexus S. Може би един телефон с акселерометър и жироскоп е добра среда за проби. https://www.diva-portal.org/smash/get/d ... TEXT02.pdf(след 13 стр.) Има IMU на Analog Devices с няколко порядъка по-висока точност. Но и цените им са безумни.
|
| Вто Фев 12, 2019 11:04 am |
|
|
|
fred
Ранг: Форумен бог
Регистриран на: Чет Окт 05, 2017 11:55 pm
Мнения: 1692
|
Re: Определяне на положението с IMU Не лети в буквалният смисъл но няма контакт с земята или някаква друга повърхност.Движи се по една траектория сравнително праволинейна, периодично тръгва и спира в интервал с известна дължина и това може да се използва като опорна точка, под земята е и няма връзка с повърхността или някакви опорни точки, няма достъп до GPS, дори до магнитното поле на земята няма защото е екранирано с желязо и това не може да се промени... Единствено останаха ускоренията защото движението е практически по едната ос която съвпада с оста на устройството. Жироскопите са необходими когато има завъртане около ос но точно в това устройство това не е необходимо, движението е надлъжно по оста на сензора и завъртането е без значение. За в бъдеще е възможно развитие в тази насока и тогава става съвсем кофти защото жироскопите освен шум имат и доста голям дрейф. Задачата може да се реши, правено е макар и за друга област /но доста скъпо/ иначе нямаше и да се захвана с нея. Проблемът е да бъде решена евтино и с приемлива точност. Най-малкото защото съм на етап проверка на идея и демонстрационен макет и парите ги вадя от собственият джоб. Аз досега обръщах внимание на точността на сензорите и разрешаващата способност, но явно вече трябва да внимавам и за шума в изходният сигнал на акселерометъра, може да се окаже решаващо за точността. Ще проуча какво има но ето това от SparkFun като че ли става за начало. Защото освен сензорите има и микроконтролер а при мен фактически става дума за Data Logger с автономно захранване. И освен това именно поради шума в сигнала на сензора използват филтри на Калман и други софтуерни трикове за обработката му.Освен това се ползват готови библиотеки за обработката до ниво кватерниони. По-сложно е отколкото ми трябва но и $40-50 не са чак толкова големи пари. Като го купя ще го поразходя из парка да видя какво ще се получи като резултат. https://www.sparkfun.com/products/14001 Има и по-евтини в които обработката на сигнала е дадена на специализиран чип но пък там няма микроконтролер който да записва в паметта, трябва да се слага допълнително. https://www.aliexpress.com/item/Absolut ... 65847.html В крайна сметка трябва да се стигне до нещо подобно. Малко са я понадули цената до $250 но ако експериментите и демонстрациите покажат сериозен интерес може и на него да се мине. Или на сензорите му, пишат че дават 10 пъти по-добра точност от Калман. https://yostlabs.com/product/3-space-data-logger/
_________________
Остап Бендер: Спасяването на давещите се е дело на самите давещи се.
Стендал: Овчарят винаги се стреми да убеди овцете, че неговите и техните интереси съвпадат.
|
| Вто Фев 12, 2019 11:20 am |
|
|
|
ToHu
Ранг: Форумен бог
Регистриран на: Нед Сеп 26, 2004 8:21 pm
Мнения: 28019
Местоположение: София
|
Re: Определяне на положението с IMU Значи, ако ти е известна траекторията на движение и искаш да намериш само неговото положение, да една ос би трябвало да е достатъчна, въпреки че аз бих използвал и трите. дали е една или три не е много по-сложно, и сметките не са кой знае колко сложни, нарича се система за инерционна навигация, прилага се от 60-те, да не говорим че и фау е имало подобна навигация но механична. това се движи до колкото разбирам в тръбопровод или нещо такова.
п.с. може да го допълниш или дублираш с оптично отчитане на изминатото разстояние.
|
| Вто Фев 12, 2019 11:47 am |
|
|
|
fred
Ранг: Форумен бог
Регистриран на: Чет Окт 05, 2017 11:55 pm
Мнения: 1692
|
Re: Определяне на положението с IMU Добра идея! Ако успея да намеря някакви застрашени от изчезване къртици доста парици мога да смъкна с някоя евро-еко-програма Едни приятели така две години "спасяваха" някакви редки червеногъзи патки. Обитавали някакво блато насред което от стар изоставен сондаж от 2-3000м дълбочина блика гореща към 90 градуса вода пълна с минерали и отрови. И приятелите 2 години хладнокръвно мерят замърсяването, чертая карти с изолинии, някакви чужди баби идват и охкат за горките патки... Всичко това лятно време защото блатото на брега на морето. Вместо просто да се завари един капак на сондажа или да се извърши стандартната операция "ликвидиране на водоприток с циментиране". Е, не е евтино за тези дълбочини и налягания, не се и знае и дали ще стане, но пък от картите и изолиниите гарантирано нямаше да им стане по-добре на патките. Така че ако знаете някаква заплашена еко-къртица обаждайте се, давам процент
_________________
Остап Бендер: Спасяването на давещите се е дело на самите давещи се.
Стендал: Овчарят винаги се стреми да убеди овцете, че неговите и техните интереси съвпадат.
|
| Вто Фев 12, 2019 11:53 am |
|
|
|
fred
Ранг: Форумен бог
Регистриран на: Чет Окт 05, 2017 11:55 pm
Мнения: 1692
|
Re: Определяне на положението с IMU Траекторията може да се измери и я мерят, но е скъпичко. Така че като първо приближение тези 10 метрови интервали ги смятаме за права линия и ги използваме като репер при други измервания, и без това я мерят траекторията приблизително в такъв интервал. А пък за 3D пространството те вече са се набутали със съответният уред. Може да се мисли за разработване на нещо по-евтино за измерване на траекторията но не ми се занимава, само като си помисля за калибриране и стендове и ми се завива свят. Отгоре на това и серията е мижава.
_________________
Остап Бендер: Спасяването на давещите се е дело на самите давещи се.
Стендал: Овчарят винаги се стреми да убеди овцете, че неговите и техните интереси съвпадат.
|
| Вто Фев 12, 2019 12:02 pm |
|
|

